Products
-
 SW-1801P Normally open vibration sensor module alarm module high sensitivity vibration switch module - AR608
Original price was: ₹ 188.00.₹ 139.00Current price is: ₹ 139.00.
SW-1801P Normally open vibration sensor module alarm module high sensitivity vibration switch module - AR608
Original price was: ₹ 188.00.₹ 139.00Current price is: ₹ 139.00.
-
 80 mm-A Mecanum Wheel Compatible with 6.7mm Coupling (Pack of 4)-Yellow
Original price was: ₹ 999.00.₹ 849.00Current price is: ₹ 849.00.
80 mm-A Mecanum Wheel Compatible with 6.7mm Coupling (Pack of 4)-Yellow
Original price was: ₹ 999.00.₹ 849.00Current price is: ₹ 849.00.
-
60 mm-A Mecanum Wheel Compatible with 6.7mm Coupling (Pack of 4)-Yellow
Original price was: ₹ 999.00.₹ 849.00Current price is: ₹ 849.00.
-
 Raspberry Pi ZERO W Red White Dustproof Case
Original price was: ₹ 149.00.₹ 128.00Current price is: ₹ 128.00.
Raspberry Pi ZERO W Red White Dustproof Case
Original price was: ₹ 149.00.₹ 128.00Current price is: ₹ 128.00.
-
 Raspberry Pi Zero W (Wireless) With In-Built Wifi and Bluetooth
Original price was: ₹ 1,849.00.₹ 1,649.00Current price is: ₹ 1,649.00.
Raspberry Pi Zero W (Wireless) With In-Built Wifi and Bluetooth
Original price was: ₹ 1,849.00.₹ 1,649.00Current price is: ₹ 1,649.00.
B-Tech Project
Robotics Courses
Robotics Training
Ercoms Robotics Lab Provide Learning On www.ercomsroboticlab.com

Custom Projects
We are Design all type of project for all branch like Electronics , Mechanical, Robotics, Etc.
Best Robotics Projects
over design is the best design for robotics.
Google Review







")
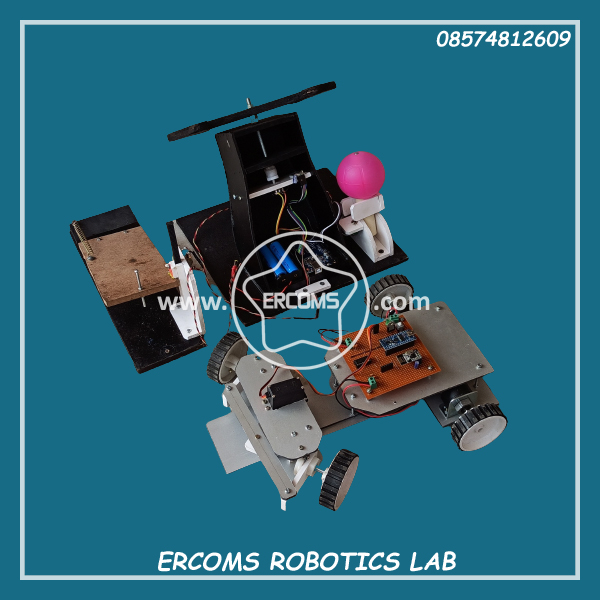
Hydraulic Actuated Arm Using Syringe With Motor (Wired)
Download Project Abstract/Synopsis.
Project Code: ERME -N/A
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
Abstract:
Note:
- Project Image only Illustration Purpose, Project may be same or may be Different.
- The codes and schematics are working and have been thoroughly tested before creating this listing.
- In case of any issue, feel free to contact us on mail (Contact@ercoms.com) or via whatsapp (+91 857412609).
Specifications
Features
Video
Term & Conditions
- Goods once sold will not taken back.
- We don’t provide any credits facility.
- Research Products has only counter Warranty.
- Project could be either this or it could be better.
- Product will be released when 100% Payment Complete.
Only logged in customers who have purchased this product may leave a review.
Related products
-

Artificial Hand For Disabled Person
₹ 5,000.00Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB002
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 48+
-

Oil Water Gas Pipeline Crawler For inside Cleaner (Wired)
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB013
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
-

Automatic Whiteboard Cleaner (Wired)
Read moreDownload Project Abstract/Synopsis.
Project Code: ERRB005
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 45+
-

Obstacle avoiding CT6B Controlled Robot
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB036
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
-

Stair Climber Robot Controlled By Smart Phone
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB011
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
-

Mechanical Spider (Bend Leg) Using Klan Mechanism (Wired)
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB015
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
-

Mechnical Spider (Arc Leg) Using RF Controlled
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB012
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
-

Line Follower Robot (Without Controller)
Register Now!Download Project Abstract/Synopsis.
Project Code: ERRB016
Project Contains:
- Model: 100% Working hardware,
- Demo: On video call, before shipping the of the project,
- Installation support: via Call/Skype/Team Viewer/Mail,
- Report: In Docs Format (.doc), relevant content in the separate files.
- Power Supply: Battery Not Included in shipping.
Payment On Instalment:
- 1st Registration Charge: 10% of Project price,
- 2nd Development Charge: 50% of Project price,
- 3rd Remaining Charge: At the Time of Project Demo.
All Charge is included in Project Price. (No any extra charges). After the deposit of 60% of the amount, the construction of the project work starts.
All Over India Shipping. “Shipping Charge not included in Project Price.”
100% Student Support || Hand Made || Copy Sold: 65+
Reviews
There are no reviews yet.